 机器人模块化设计
机器人模块化设计
曾经的表格,数据如风; 变更无迹,查找成空。 现今的系统,日志加持; 模块清晰,管理轻松。
# 🤖 背景介绍
在机器人硬件设计上,模块化已经是标配了。这样可以让机器人具备更强的适应性,随时更换或升级不同的功能部件。
想象一下:你手头有一堆机器人,硬件设计得可漂亮了,全是模块化拼接,像搭乐高似的,通信模块、电源模块、传感器模块……听起来是不是很酷?
但在管理层面,一直以来都是个麻烦事。
之前,我们团队主要通过 飞书表格 记录机器人使用的模块,比如某个机器人换了新的通信模块,大家就在表格里手动更新。但问题来了:
- 无法追溯 🔍:换过几次?用过哪些版本?全靠翻表格,难查!
- 多人编辑,易出错 📝:手误或者遗漏,导致数据不准确。
- 管理效率低 🕑:想查询某个机器人当前的模块状态?要翻很多历史记录。
于是,我们决定开发一个后台管理系统来解决这个问题,确保机器人模块信息 实时可查,可追溯,可管理。
# 🛠️ 方案构思
我们的目标很明确:
- 实时查看 机器人当前使用的模块。
- 追踪模块更换历史,做到可回溯。
- 模块管理,支持更细粒度的模块记录,而不仅仅是完整模块。
- 全局设计,考虑未来扩展性,避免后期改动成本过高。
# 🏗️ 最初的构思
最早,我们想直接 关联机器人和模块表,在数据库里记录:
Robot A -> 通信模块V1
Robot A -> 运动控制模块V2
1
2
2
但很快发现这个设计 太简单,没法满足需求,比如:
- 模块有层级关系(比如通信模块里还有子模块)。
- 无法追踪模块变化历史。
- 未来可能有多个机器人共享某些模块。
# 🚀 迭代优化
于是,我们调整了设计,采用了 三层结构:
- 机器人表(robots):存储机器人基本信息。
- 模块表(modules):记录所有模块,支持子模块。
- 机器人-模块关系表(robot_module_log):
- 记录机器人和模块的绑定关系。
- 记录变更时间,实现可追溯。
# 🎨 数据结构示意图
Robots
|
├── Robot A
| ├── 通信模块 V1
| | ├── 4G 模块
| | ├── WiFi 模块
| |
| ├── 运动控制模块 V2
|
├── Robot B
├── 通信模块 V2
├── 运动控制模块 V3
1
2
3
4
5
6
7
8
9
10
11
12
2
3
4
5
6
7
8
9
10
11
12
这样,我们不仅能查 当前使用的模块,还能回溯历史,比如:
SELECT * FROM robot_module_log WHERE robot_id = 'A' ORDER BY change_time DESC;
1
# 就能看到 Robot A 过去使用过哪些模块,以及更换时间。🎯
# 🤯 遇到的难题 & 解决方案
# 1️⃣ 模块拆分粒度如何确定?
一开始,我们纠结 模块的粒度。比如,通信模块里有 4G、WiFi,应该拆开记录吗?
💡 解决方案:
- 采用 树状结构,让模块支持子模块。
- 既能查询 完整模块,又能查询 具体某个子模块。
# 2️⃣ 模块编号咋办?
一开始我想直接用序列号,比如“COMM-001”代表通信模块,但发现有些小模块是通用的,装在不同大模块里,编号重复了咋办?
💡 解决方案:
- 加了个“上下文前缀”,比如“COMM-001@SENSOR-003”,表示这个通信模块属于某个传感器模块。麻烦是麻烦了点,但至少不乱了。
# 3️⃣ 追溯的时候,历史数据咋展示?
光知道模块换了没用,得知道为啥换、谁换的。
💡 解决方案:
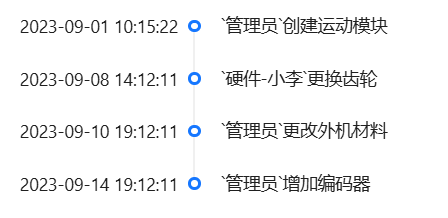
- 给每次模块变更加个“日志”,记录操作人、时间、原因。后台加了个筛选功能,能按时间轴查历史,贼方便。
# 4️⃣ 如何高效查询机器人当前模块?
由于历史变更数据很多,查询最新模块状态可能会很慢。
💡 解决方案:
- 采用 状态表缓存最新模块信息,避免每次查询都扫描整个变更日志。
- 变更时自动更新状态表,加快查询速度。
# 5️⃣ 如何保证数据变更的正确性?
多人操作时,可能会发生 数据覆盖、误删 的情况。
💡 解决方案:
- 采用 事务 确保数据一致性。
- 变更日志 不可删除,只能追加,保证追溯能力。
# 🎯 总结 & 感悟
从最初的表格管理,到结构化的数据库存储,再到考虑数据追溯、查询优化、事务管理,我们经历了一次完整的方案演进。
📌 核心经验:
- 设计时 考虑全局,避免后期大改。
- 数据结构比代码更重要,先想清楚再动手。
- 模块化不仅是硬件的事,管理同样需要模块化思维!
愿每一个代码变更,都是为了更好的未来! 🚀
上次更新: 2025/03/09, 15:45:50